Спасательные роботы в будущем могут оказаться крайне полезны, но пока им недостаёт координации и гибкости движений. Чтобы исправить эту проблему, группа японских исследователей разрабатывает новый метод управления, который позволяет человеку управлять роботом как гигантской куклой.
Сама по себе система не нова — обычно такие исследования обозначаются термином «телеприсутствие». Но учёные Токийского университета говорят, что их метод гораздо более продвинутый. Если раньше исследователям удавалось управлять лишь небольшими роботами или исключительно верхней частью туловища, то теперь они могут контролировать «тело» целиком. Для этого используются контроллеры шлема виртуальной реальности HTC Vive.
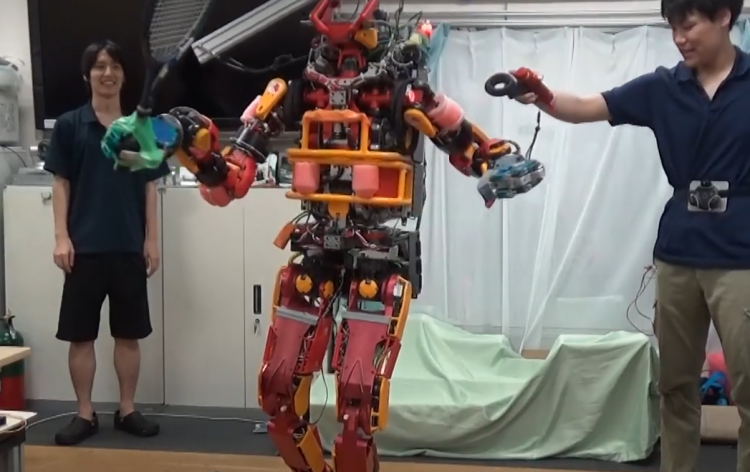
Инфракрасные маячки HTC Vive нужны для отслеживания контроллеров в трёхмерном пространстве. Учёные прикрепили по контроллеру к каждой руке и ноге робота, чтобы позиционировать движения и отправлять их машине в виде команд. При этом специальное программное обеспечение адаптирует команды под возможности робота.

«Например, ему разрешено делать шаги со скоростью ходьбы, но запрещено бегать и прыгать, — рассказал исследователь Исигуро Ясусиро (Ishiguro Yasushiro). — Мы заставляем робота всегда сохранять безопасную походку».
Ясусиро признал, что система имеет «множество слабых мест», но более гибка и отзывчива, чем другие аналогичные проекты. Сам робот был построен в университете несколько лет назад и известен как JAXON. Раньше он участвовал в конкурсе DARPA Robotics Challenge, предназначенном для тестирования подобного рода машин в сценариях бедствий.
Пока JAXON умеет только медленно ходить на двух ногах. Теперь исследователи хотят научить его подниматься и спускаться по лестницам, прыгать и бегать. «В конечном итоге мы планируем научить робота-гуманоида всему, что умеют люди», — заявил Ясусиро.

